
Pendulum Gripper
Class: 24-370: Engineering Design I
Task: As a group, design a robotic hand, powered by a stepper motor, that will grab an aluminum object, swing the object on a vertical pendulum, and set it back down within 0.010” of its original location. We are also graded on how light we can make the entire system.
Medium: Pencil, Solidworks, 3D Printing/CNC Mill
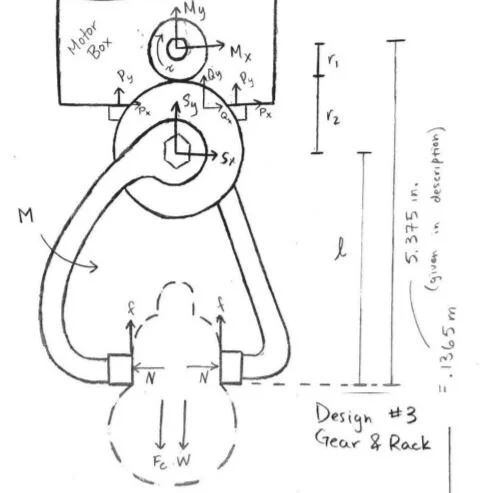
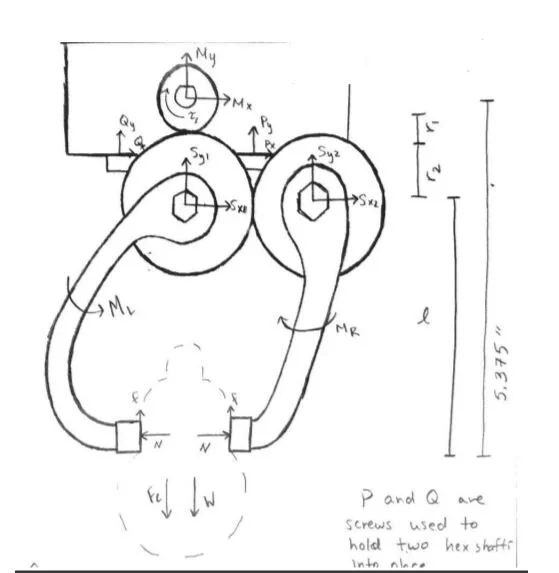
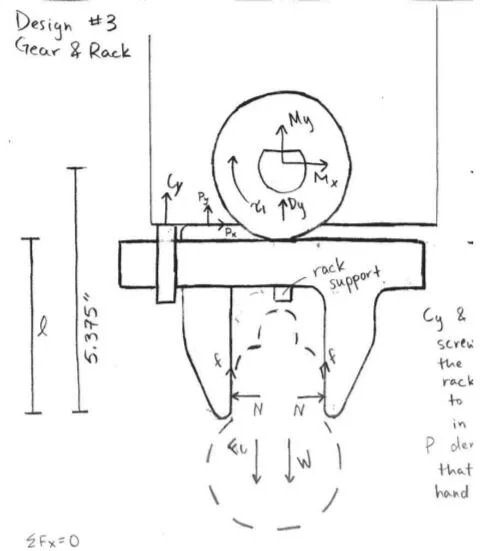
My first instinct was to create some sort of hand that had to gripping parts, one on each side of the piece. I figured it would be easiest to do this with one gripper that stayed still while another swung down when the motor was powered on. Of course we could also have both of them engage when the motor moved down, but this would be more difficult to coordinate. As another option, we could also use a rack and pinion system that would close when the motor turned on. But this seemed like it was going to be heavy. All three of my initial ideas can be seen below
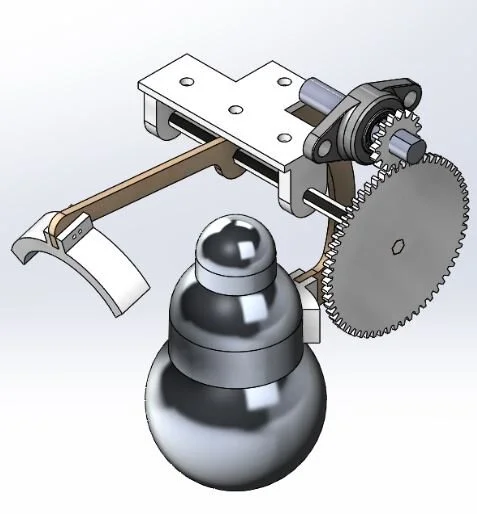
As a group, we ended up choosing Idea #1 as the idea that we wanted to move forward with. Here is a screenshot of the CAD model I made of the idea, with the object that we were required to pick up using the gripper.
We decided that 3D printing would be the best way to go for making the gripper. We were worried that acrylic might be too brittle to handle the torque of the motor, and we knew that any type of metal would be heavier than all of our classmates’ projects. And we liked the idea that we could easily 3D print new pieces if any were to break.
We had a few minor setbacks. Pretty early on, one of our gears got ripped apart by the other gear. Because of this, we decided to make the gear that got shredded out of aluminum. We had to CNC mill this gear. We also had some issues with getting a good enough grip on the object. I would slip ever so slightly while it was being swung, so we ended up changing the orientation of the gripper to get a more flush contact on the object. Beside those issues, it was mostly smooth sailing. We made our first prototype, saw that it functioned pretty well, and then tried to take away as much material as possible without messing with the functionality so that we could be as light as possible.

